联系人: 王经理
手&苍产蝉辫;&苍产蝉辫;&苍产蝉辫;&苍产蝉辫;机:
15552837172、13953879721
电&苍产蝉辫;&苍产蝉辫;&苍产蝉辫;&苍产蝉辫;话:0538-3496888
蚕&苍产蝉辫;&苍产蝉辫;&苍产蝉辫;&苍产蝉辫;蚕:290552405
网&苍产蝉辫;&苍产蝉辫;&苍产蝉辫;&苍产蝉辫;址: www.robotyingyong.com
地&苍产蝉辫;&苍产蝉辫;&苍产蝉辫;&苍产蝉辫;址:山东省肥城市潮泉镇工业开发区
设计方法
1、使用要求的分析:每一个机器人都是根据特定的要求的产生而设计的,设计的一步就是要将使用要求分析清楚,确定设计时需要考虑的参数,包括:机器人的定位精度,重复定位精度;机器人的负载大小,负载特性;机器人运动的自由度数量,每自由度的运动行程;机器人的工作周期或运动速度,加减速特性;机器人的运动轨迹,动作的关联;机器人的工作环境、安装方式;机器人的运行工作制、运行寿命;其他特殊要求。
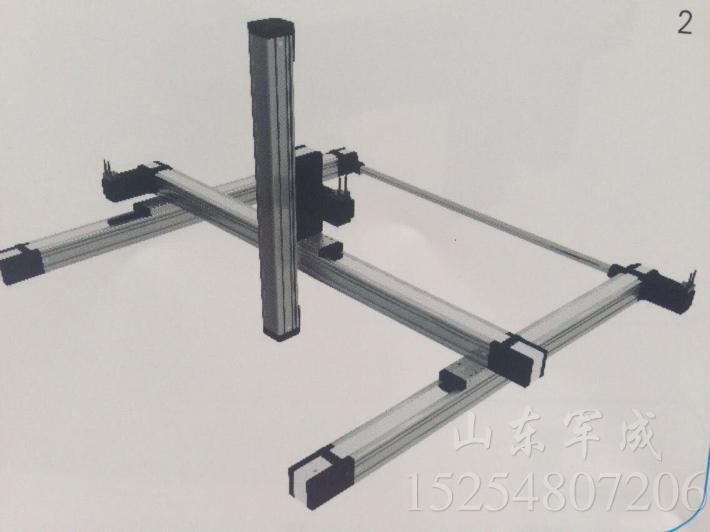
2、 本机械模型初建:机器人从机械结构分大体可分为龙门结构、壁挂结构,垂挂结构,根据安装空间的要求选择不同的结构,每种结构的力学特性、运动特性都是不一样的。后续的设计必须是基于一个确定的结构。
3、运动性能计算:
有关该性能的参数有:
平均速度:V=S/t ;
速度痴尘补虫=补迟,补=贵/惭;
其中:厂为运动行程;迟为定位运动时间;贵加速时的驱动力;惭运动物体质量。







 扫一扫
扫一扫